实射影平面

 Clash Royale CLAN TAG#URR8PPP
Clash Royale CLAN TAG#URR8PPP
| 本條目部分链接不符合格式手冊規範。跨語言链接及章節標題等處的链接可能需要清理。 (2015年12月11日) |
 射影平面的基本多边形。 | 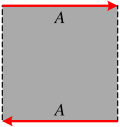 莫比乌斯带只有一条边,将相对开边反向黏合起来便成为闭合的射影平面。 |  对照克莱因瓶,是莫比乌斯带相对开边同向黏合。 |
在数学中,实射影平面(real projective plane)是R3中所有过原点直线组成的空间,通常记作RP2displaystyle mathbb R P^2

实射影平面有时描述为基于莫比乌斯带的构造:如果能把莫比乌斯带的(一条)边以恰当的方向黏合,将得到射影平面。等价地,沿着莫比乌斯带的边界黏合一个圆盘给出射影平面。
由于莫比乌斯带可构造为将正方形的一组对边反向黏合,从而实射影平面可以表示为单位正方形([0,1] × [0,1])将它的边界通过如下等价关系等同:
- (0, y) ~ (1, 1 − y) 对0 ≤ y ≤ 1 ,
以及
- (x, 0) ~ (1 − x, 1) 对0 ≤ x ≤ 1,
即如右图所示。因为正方形同构于圆盘,故这也等价于将圆盘边界的对径点黏合。
目录
1 构造
2 实射影平面浸入三维空间
3 齐次坐标
4 嵌入4维空间
5 高阶亏格
6 又见
7 参考文献
构造
考虑一个球面,设球面的大圆(假设地球是一个球形,那么赤道就是大圆)是“直线”,对径点对是“点”(一对对径点是通过大圆圆心的直线与大圆相交的两个点)。容易验证它们满足射影平面所需的公理:
- 任何两个不同的大圆交于一对对径点;
- 任何两个不同的对径点对位于惟一一个大圆上。
这就是实射影平面。
如果我们将球面上每个点与其对径点等同,则我们得到了实射影平面的一个表示,其中射影空间的“点”确实是点。
射影平面是球面在等价关系~下的商空间,这个等价关系~就是对径关系,即 x ~ y当且仅当y = −x。这个球面的商空间同构于R3中所有通过原点的直线的集合。
所得的曲面是一个2维紧不可定向流形,有一点难以想象,因为它不能无自交地嵌入三维欧几里得空间中。
从球面到实射影平面的商映射事实上是一个(2对1)覆盖映射。从而实射影平面的基本群是二阶循环群,即整数模2群。可以取上图中的环路AB作为生成元。
实射影平面浸入三维空间

罗马曲面动画示意图
射影平面不能嵌入(这要求没有自交)三维空间,不过可以浸入(局部邻域没有自交点)。伯伊曲面(Boy's surface)是浸入的一个实例。
罗马曲面(Roman surface)是从射影平面到三维空间一个更加退化的映射,包含一个交叉帽(cross-cap)。同样对具有一个交叉套的球面也成立。
射影平面不能嵌入三维欧几里得空间,可作如下证明:假设可以嵌入,由广义若尔当曲线定理它将在三维欧几里得空间中围出一个紧区域。向外的单位法向量场将给出边界流形的一个定向,但边界流形就是射影平面,它是不可定向的。这是一个矛盾,从而我们所假设的嵌入必定是错误的。
实射影平面的一个多面體半形表示是四面半六面體。
从相反的方向来看,立方體半形、十二面體半形以及二十面體半形、抽象正则多面體(abstract regular polychora),都可以构造成射影平面中的正则图形。
齐次坐标
平面中的直线集合可以用齐次坐标表示。直线ax+by+c=0可以表示为[a:b:c]。这些坐标有等价关系,对所有非零d,[a:b:c] = [da:db:dc]。从而相同直线的不同表示dax+dby+dc=0有同样的坐标。坐标集合[a:b:1]给出了通常实平面,而坐标集合[a:b:0]定义了一个无穷远直线。
嵌入4维空间
射影平面可嵌入一个4维欧几里得空间。考虑RP2displaystyle mathbb R P^2






高阶亏格
基本多边形一文提供了高阶亏格实射影平面的一个描述。
又见
- 射影空间
实射影平面的蒲不等式(蒲保明)
参考文献
- 埃里克·韦斯坦因. Real Projective Plane. MathWorld.
尤承业, 基础拓扑学讲义, 北京大学出版社, 2004年, ISBN 7-301-03103-3