坐標系

 Clash Royale CLAN TAG#URR8PPP
Clash Royale CLAN TAG#URR8PPP
坐標系是數學或物理學用語,定義如下:
对于一个n维系统,能够使每一个点和一组(n个)标量构成一一对应的系统[1][2]。
坐標系可以用一個有序多元组表示一個點的位置。一般常用的坐標系,各維坐標的數字均為實數,但在高等數學中坐標的數字可能是複數,甚至是或是其他抽象代數中的元素(如交换环)。坐標系可以使幾何學的問題轉換為數字的問題,反之亦然,是解析幾何學的基礎[3]。
描述地理位置時所用的經度及緯度就是坐標系統的一種。在物理學中,描述一系統在空間中運動的參考坐標系統則稱作參考系。
目录
1 數軸
2 笛卡兒座標系
3 極座標系
4 圓柱座標系及球座標系
5 齐次坐标
6 其他幾何形狀的座標表示
7 座標圖
8 座標的變換
9 坐标轉換
10 坐标曲線及坐标曲面
11 常用的座標系
12 正交坐标系列表
13 象限
14 參照
15 參考資料
數軸
數軸是最簡單的坐標系,用一個實數標示一個點在線上的位置。數軸中會有一個原點O,以及單位長度及其方向。點P的坐標為從O到P的有號距離,坐標是正值或負值則依P點在原點的哪一側來決定。數軸上每一個點都有唯一的坐標,每一個實數也都可以在數軸上找到唯一的對應點[4]
笛卡兒座標系
笛卡兒座標系也稱為直角座標系,是最常用到的一種座標系。是法國數學家勒內·笛卡尔在1637年發表的《方法論》附錄中提到的[5]。
在平面上,選定二條互相垂直的線為座標軸,任一點距座標軸的有號距離為另一軸的座標,這就是二維的笛卡兒座標系,一般會選一條指向右方水平線稱為x軸,再選一條指向上方的垂直線稱為y軸,此兩座標軸設定方式稱為「右手座標系」。
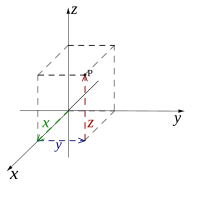
若在三維系統中,選定三條互相垂直的平面,任一點距平面的有號距離為座標,二平面的交線為座標軸,即可產生三維的笛卡兒座標系。一般會選擇x軸及y軸是水平的,z軸垂直往上,且三軸維持右手定則,若先將右手的手掌與手指伸直。然後,將中指指嚮往手掌的掌面 半空間,與食指呈直角關係。再將大拇指往上指去,與中指,食指都呈直角關係。則大拇指,食指,與中指分別表示了右手座標系的 x-軸,y-軸,與 z-軸。
此概念可以延伸,在n維的欧几里得空间中建立n維的笛卡兒座標系。

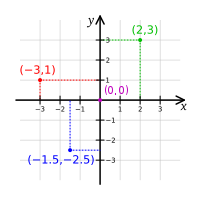
平面的笛卡兒座標系
極座標系

平面上的極座標系
極座標系也是一種常用的平面座標系統。实际上应用“极坐标”這個术语的是由格雷古廖·豐塔納(Gregorio Fontana)开始的,是由喬治·皮科克(George Peacock)在1816年翻译席維斯·拉克魯克斯(Sylvestre François Lacroix)的《微分學與積分學》(Traité du calcul différentiel et du calcul intégral)[6]一书时,被翻译为英语的。
極座標中會定一點為極點,再將一條通過極點的射線定為極軸。若給定一角度θ,則可繪出通過極點,和極軸夾角為θ的唯一射線(角度是以從極軸,依逆時針方向旋轉到射線),若再給定一實數r,可找出上述射線上,距極點距離為有號整數r的一點[7]。
在極座標系中,一座標(r, θ)只會其對應唯一的一點,但每一點均可對應許多個座標。例如座標(r, θ)、 (r, θ+2π)及(−r, θ+π)都是對應同一點的不同座標。而極點的座標為(0, θ),θ可為任意值。
极坐标rdisplaystyle r,

r=y2+x2displaystyle r=sqrt y^2+x^2quad(參閱畢氏定理)
θ=atan2(y,x)displaystyle theta =operatorname atan2 (y,x)quad(atan2是已將象限納入考量的反正切函數)
从直角坐标xdisplaystyle x,

- x=rcosθdisplaystyle x=rcos theta ,
- y=rsinθdisplaystyle y=rsin theta ,


圓柱座標系及球座標系
若將平面上的极坐标系擴展到立體的空間,可擴展為圓柱座標系及球座標系。
圓柱座標系是將极坐标系的 (r, θ)displaystyle (r, theta )


ρdisplaystyle rho是原點至P點之間的距離。
ϕdisplaystyle phi是線 OP 在 xy-面的投影線與正 x-軸之間的夾角。
- z與直角座標的 zdisplaystyle z
等值。
直角座標和圓柱座標系的轉換關係如下[8]:
- x=ρcosϕdisplaystyle x=rho ,cos phi
- y=ρsinϕdisplaystyle y=rho ,sin phi
- z=zdisplaystyle z=z,



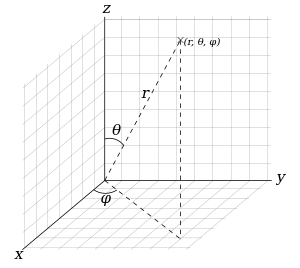
用球座標 (r, θ, ϕ)displaystyle (r, theta , phi )
 來表示一個點的位置
來表示一個點的位置
用圓柱座標 (ρ, ϕ, z)displaystyle (rho , phi , z)
來表示一個點的位置而球座標系則是用一個角度 ϕdisplaystyle phi
rdisplaystyle r是原點至P點在xy-面上投影點之間的距離。
ϕdisplaystyle phi
θdisplaystyle theta為原點到點 P 的連線與正 z-軸之間的天頂角。
直角座標和球座標系的轉換關係如下[8]:
- x=rsinθcosϕdisplaystyle x=r,sin theta ,cos phi
- y=rsinθsinϕdisplaystyle y=r,sin theta ,sin phi
- z=rcosθdisplaystyle z=r,cos theta




球座標系下的座標曲面
齐次坐标
在齊次座標表示時,會增加一個額外的座標,例如平面上的一點可以表示為(x, y, z),其中x/z及y/z為其原來在平面上的笛卡爾座標。其優點是可以在不使用無限大的情形下表示射影平面上的任意點。一般齊次座標會用在座標之間的比例比實際的數值來的重要的情形下。
其他幾何形狀的座標表示
座標系常用來描述一個點的位置,不過也可以用座標系描述其他複雜形狀的位置,例如直線、平面、圓或是球等。例如普呂克座標就是用來描述空間中直線的位置。當有需要時,可以在座標系的前面加上需描述的形狀做為識別,例如直線座標就是指描述直線位置的座標。曲線為平行座標軸的直線。其他座標系的座標曲線就是一般的曲線。例如在極座標系中,若固定r為定值所形成的座標曲線是圓心在原點的圓。在欧几里得空间中笛卡爾座標系以外的座標系即稱為曲線座標系[9]。
若在三維座標系中一個座標維持定值,允許其他座標變動,所形成的曲面稱為座標曲面。例如在球座標系,若固定ρ為定值所形成的座標曲面是球心在原點的球。三維空間中二座標曲面的交線即為坐标曲線。在更高維度的空間也可依此定義座標超曲面[10]。
座標圖
座標圖(coordinate map)的概念是流形理論的核心。本質上座標圖是一個針對給定空間子集的座標系,其中每一個點都恰有一個對應的座標。若要精準的定義,座標圖可定義為從空間X的開子集到Rn的開子集的同胚。一般的座標系不太可能針對所有空間中的點都有明確唯一的座標。此時可以用一組座標圖形成一個適合此空間的圖冊。有此性質的空間稱為流形,若座標圖重疊的部份符合某些特定的結構,也可以定義有特殊結構的流形。例如微分流形就是座標圖之間的轉換恆為微分函數的流形。
座標的變換
在幾何學及運動學中,座標系不但會用來描述點的直線位置,也會用來描述軸、正切角平面或剛體的角度取向。一般會設定一固定於剛體的參考系,稱為
坐标轉換
坐标轉換是指在描述同一個空間時,由原來的座標系轉換為另一個座標系。
對於每一個由空間到空間本身的對射,可定義二種坐标轉換:
- 一種是每一個點在新座標系座標的對射,恰為舊座標系的座標。
- 一種是每一個點在舊座標系座標的對射,恰為新座標系的座標。
例如一維的系統中,若一映射為是往右移三個單位,則第一個座標轉換會將原點從0移到3,因此每個點的座標都少了3,第二個座标轉換會將原點從0移到-3,因此每個點的座標都多了3。
座標之間的轉換有一定的公式。例如若平面上的笛卡爾座標(x, y)及極座標(r, θ)原點相同,則可以用以下的公式從極座標轉換為笛卡爾座標:x = r cosθ及y = r sinθ。
坐标曲線及坐标曲面
若在二維座標系中一個座標維持定值,只允許一個座標變動,所形成的曲線稱為座標曲線(或座標線)。不過不是所有的座標系都有座標曲線,例如齊次座標系中就沒有座標曲線。
在笛卡爾座標系中,座標附體參考系,另一個不隨剛體變動的參考則為空間參考系。一般剛體的運動可以在附體參考系下的座標來表示,再根據附體參考系相對空間參考系的位置及取向來取得剛體相對空間的運動。例如剛體的角度取向可以用一個方向矩陣來描述,矩陣的三個欄是三個點的笛卡爾座標,這些可用來標示局部座標系統的座標軸方向,也可用來計算座標軸的單位向量。
常用的座標系
以下是一些常用的座標系:
- 三維空間中的笛卡爾座標系(也稱為直角座標系)是定義三個互相垂直的座標平面,一點的座標即為點到各座標平面的垂直距離。
曲線座標系是一種廣義的座標系,此座標系是以相交的曲線為基礎。- 平面上的極座標系是以用一點相對原點的角度及距離來表示。
- 平面上的對數-極座標系是以用一點相對原點的角度及其距離的對數來表示。
- 三維空間中的圓柱座標系是以一個角度、高度及一長度來表示一個點。
- 三維空間中的球座標系是以二個角度及點到原點的距離來表示一個點。
普呂克座標可以將三維空間中的直線描述為6個齊次座標。
廣義座標是在處理拉格朗日力學時使用。
正則座標是在處理哈密頓力學時使用。
平行座標將n-維空間中的一點表示為和n條垂直線有交點的折線。
重心座標一般用在三角图中。
可有一些描述曲線的方式和座標系無關,這類的方式會使用本徵方程,其中有用到像是曲率及弧長等不隨座標系而改變的不變量。這類的本徵方程包括:
惠威尔方程和弧長和有關。
切薩羅方程和弧長及曲率有關。
正交坐标系列表
數學上,二個互相垂直的向量稱為正交。以下的坐标系都是正交坐标系,其坐标曲面之間的夾角為直角。
象限

四象限图示
以笛卡兒平面坐標系為基準,右上為第一象限,左上為第二,左下為第三,右下就是第四象限,第一象限的x坐標和y坐標均為正值,第二象限的x坐標為負值,y坐標為正值,第三象限的x坐標和y坐標均為負值,第四象限的x坐標為正值,y坐標為負值[11],而平面坐標分六大部分,除了四個象限,還有x軸與y軸。
在笛卡兒空間坐標系中也可以依xy平面,xz平面及yz平面將不含上述平面空間分為八份,稱為卦限,但一般只定義坐標均大於零的為第一卦限。
坐標中的各軸線不屬於象限或卦限。
參照
- 字母數字網格
- 天球坐标系统
- 參考系
- 伽利略變換
諾謨圖,不同坐标系的圖象表示法- 经纬度
參考資料
^ Woods p. 1
^ 埃里克·韦斯坦因. Coordinate System. MathWorld.
^ 埃里克·韦斯坦因. Coordinates. MathWorld.
^ Woods p. 8
^ 解析几何创立者——笛卡儿. 中国数字科技馆. [2014-03-25] (中文).
^ Klaasen, Daniel. Historical Topics for the Mathematical Classroom.
^ 陳敏晧. 極座標( Polar Coordinate ). 國科會高瞻自然科學教學資源平台. 2013-10-22 [2014-03-25] (中文).
^ 8.08.1 §1.4 矢量在不同坐标系中的变换. 西北工業大學. [2014-03-25] (中文). [永久失效連結]
^ Tang, K. T. Mathematical Methods for Engineers and Scientists 2. Springer. 2006: 13. ISBN 3540302689.
^ Liseikin, Vladimir D. A Computational Differential Geometry Approach to Grid Generation. Springer. 2007: 38. ISBN 3540342354.
^ 千華數位文化; 張宏印; [升科大四技]. 數學(C)工職 完全攻略. 千華數位文化. 9 July 2013: 1–. ISBN 978-986-315-547-8.
Voitsekhovskii, M.I.; Ivanov, A.B., Coordinates, (编) Hazewinkel, Michiel, 数学百科全书, Springer, 2001, ISBN 978-1-55608-010-4
Woods, Frederick S. Higher Geometry. Ginn and Co. 1922: 1ff.
Shigeyuki Morita, Teruko Nagase, Katsumi Nomizu. Geometry of Differential Forms. AMS Bookstore. 2001: 12. ISBN 0821810456.
| ||||||||||
|