Linear equation

 Clash Royale CLAN TAG#URR8PPP
Clash Royale CLAN TAG#URR8PPP 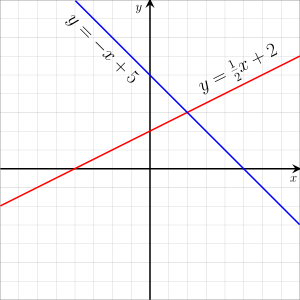
Two Graphs of linear equations in two variables
In mathematics, a linear equation is an equation that may be put in the form
- a1x1+⋯+anxn+b=0,displaystyle a_1x_1+cdots +a_nx_n+b=0,

where x1,…,xndisplaystyle x_1,ldots ,x_n


In the words of algebra, a linear equation is obtained by equating to zero a linear polynomial over some field, where the coefficients are taken from, and that does not contain the symbols for the indeterminates.
The solutions of such an equation are the values that, when substituted to the unknowns, make the equality true.
The case of just one variable is of particular importance, and it is frequent that the term linear equation refers implicitly to this particular case, in which the name unknown for the variable is sensibly used.
All the pairs of numbers that are solutions of a linear equation in two variables form a line in the Euclidean plane, and every line may be defined as the solutions of a linear equation. This is the origin of the term linear for qualifying this type of equations. More generally, the solutions of a linear equation in n variables form a hyperplane (of dimension n – 1) in the Euclidean space of dimension n.
Linear equations occur frequently in all mathematics and their applications in physics and engineering, partly because non-linear systems are often well approximated by linear equations.
This article considers the case of a single equation with coefficients from the field of real numbers, for which one studies the real solutions. All its content applies for complex solutions and, more generally, for linear equations with coefficient and solutions in any field. For the case of several simultaneous linear equations, see System of linear equations.
Contents
1 One variable
2 Two variables
2.1 In Cartesian coordinates
2.2 Slope–intercept form
2.3 Point–slope form
2.4 Intercept form
2.5 Two-point form
2.5.1 Expanded form
2.5.2 Symmetric form
2.5.3 Determinant form
2.5.4 Mnemonic determinant
2.5.5 Vectorial treatment
2.6 Matrix form
2.7 Parametric form
2.8 Connection with linear functions
2.9 Example
3 More than two variables
4 See also
5 Notes
6 References
7 External links
One variable
Frequently the term linear equation refers implicitly to the case of just one variable. This case, in which the name unknown for the variable is sensibly used, is of particular importance, since it offers a unique value as solution to the equation. According to the above definition such an equation has the form
- ax+b=0,displaystyle ax+b=0,

and, for a ≠ 0, a unique value as solution
- x=−ba.displaystyle x=-frac ba.

The above equation may always be rewritten to
- ax=−b=b′,displaystyle ax=-b=b',

and the solution is of course the same in both cases:
- x=b′a=−ba.displaystyle x=frac b'a=-frac ba.

In the case of a=0displaystyle a=0
b=0:displaystyle b=0:Every value for xdisplaystyle x
is a solution to the equation 0⋅x+0=0,displaystyle 0cdot x+0=0,
and
b≠0:displaystyle bneq 0:There is no solution for the equation 0⋅x+b=0,displaystyle 0cdot x+b=0,
the equation is said to be inconsistent.
Two variables
In the case of just two variables the indexed variable names x1displaystyle x_1







- ax+by+c=0.displaystyle ax+by+c=0.

Any change to such an equation that does not alter the set of solutions, i.e., the set of pairs (x,y)displaystyle (x,y)
Ax+By=C,displaystyle Ax+By=C,quadwith A=a,B=bdisplaystyle quad A=a,;B=bquad
and C=−c.displaystyle quad C=-c.

These equivalent variants are sometimes given generic names, like general form or standard form,[1] but contribute no new concepts.
The set of solutions also does not change when both sides of the equation are multiplied by the same non-zero number. According to the above definition, adisplaystyle a


b≠0:y=mx+y0,displaystyle bneq 0:quad y=mx+y_0,quad ;with m=−abdisplaystyle quad m=-frac abquad ;
and y0=−cb,displaystyle quad y_0=-frac cb,quad
or
a≠0:x=m′y+x0,displaystyle aneq 0:quad x=m'y+x_0,quadwith m′=−badisplaystyle quad m'=-frac baquad
and x0=−ca.displaystyle quad x_0=-frac ca.

When both coefficients adisplaystyle a
S=∀x∈R,displaystyle S=(x,mx+y_0),quadwhich is equal to the set S=∀y∈R.displaystyle quad S=(m'y+x_0,y).

In this case both components of the pairs in the set Sdisplaystyle S
When exactly one coefficient, either adisplaystyle a
y=y0,displaystyle y=y_0,quadfor a=0,b≠0,displaystyle quad a=0,;bneq 0,quad
with the set of solutions Sx=(x,y0),displaystyle quad S_x=;forall xin mathbb R ,quad
or
x=x0,displaystyle x=x_0,quadfor b=0,a≠0,displaystyle quad b=0,;aneq 0,quad
with the set of solutions Sy=∀y∈R.displaystyle quad S^y=;forall yin mathbb R .

For both alternatives this is a set of pairs of numbers, where either the second component is a constant, and the first varies over all the reals (Sxdisplaystyle S_x

In Cartesian coordinates
Every single solution of a linear equation in two variables can be interpreted as two coordinate values, fixing a point in the Euclidean plane with a Cartesian coordinate system. The sets of solutions of such an equation make up a two-dimensional graph, which can be depicted in this plane. Conventionally, the first component of a solution (x,y)displaystyle (x,y)
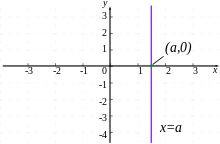
Vertical Line x=x0displaystyle x=x_0

(in the picture:x0↦a)displaystyle (textin the picture:;x_0mapsto a)

In the case of a≠0,b=0displaystyle aneq 0,;b=0





The set of solutions defines a function f(t)displaystyle f(t)





Horizontal Line y=y0displaystyle y=y_0

(in the picture:y0↦b)displaystyle (textin the picture:;y_0mapsto b)

The sets Sxdisplaystyle S_x




In the case of a≠0≠bdisplaystyle aneq 0neq b







Besides the intercepts being obvious from graphing the solutions of a linear equation in two variables, also their ratio (if it exists) can be graphically interpreted as determining the incline of the considered line (and all lines parallel to it). The slope of a straight line, usually introduced as rise over run, is the negative ratio of the rise, the ydisplaystyle y
- −y0x0=−−cb−ca=−ab=m,displaystyle -frac y_0x_0=-frac -tfrac cb-tfrac ca=-frac ab=m,

which holds if both intercepts exist. If the xdisplaystyle x

Since rise and run of a straight line can be determined not only between the intercept points and the origin (x0−0displaystyle x_0-0



- m=y2−y1x2−x1=y1−y2x1−x2.displaystyle m=frac y_2-y_1x_2-x_1=frac y_1-y_2x_1-x_2.

Denoting the angle enclosed by the xdisplaystyle x
- tanφ=m=−ab.displaystyle tan varphi =m=-frac ab.

For b=0displaystyle b=0

This shows that only two of x0,y0displaystyle x_0,;y_0
With the premise that at least one axis is intersected, and since both intercept values may range over the whole real number line, all parallels to both axes as well as all oblique straight lines, i.e., in fact all straight lines in the Euclidean plane, can be expressed by linear equations in two variables, and all such equations denote either oblique or axis-parallel straight lines. Therefore all equations, equivalent to one of the above forms are often referred to as "equations of a line". They are adjusted to fit best to specific tasks, and are given therefore specific names, described below. In what follows, x,y,t,θdisplaystyle x,;y,;t,;theta 
Slope–intercept form
This form relies on the habit of writing y=f(x)displaystyle y=f(x)

- y=mx+y0.displaystyle y=mx+y_0.

This way the slope m=−abdisplaystyle m=-tfrac ab

The ydisplaystyle y


Recalling the xdisplaystyle x
- y=−abx−cb=−ab(x+ba⋅cb)=m(x−x0),displaystyle y=-frac abx-frac cb=-frac ab(x+frac bacdot frac cb)=m(x-x_0),

involving the slope mdisplaystyle m
In the case of b=0,displaystyle b=0,
For a≠0≠bdisplaystyle aneq 0neq b
x=m′y+x0,displaystyle x=m'y+x_0,quadwith m′=ba.displaystyle m'=tfrac ba.

The graph of this equation, having the same set of solutions, is necessarily identical to the above graph, but depicting it under exchanged assignment of the variables to the coordinate-axes ((x,y)↦(y-axis,x-axis)displaystyle (x,y)mapsto (ytext-axis,;xtext-axis)




The graph of a vertical line (b=0displaystyle b=0


Point–slope form
It is observational evident that fixing an arbitrary point on a line and a slope uniquely defines this straight line. In the slope-intersect form this point on the line is either taken as the intersection (0,y0)displaystyle (0,y_0)
- y−y1=m(x−x1).displaystyle y-y_1=m(x-x_1).

The point-slope form expresses the fact that the difference of the ydisplaystyle y


Intercept form
Straight lines that cross both coordinate axis outside the origin can be specified via the intercept form, that employs just these two values to specify an appropriate equation
- xx0+yy0=1.displaystyle frac xx_0+frac yy_0=1.

The intercept form results from moving cdisplaystyle c

- (−ac)x+(−bc)y=1x0x+1y0y=1,displaystyle (-frac ac)x+(-frac bc)y=frac 1x_0x+frac 1y_0y=1,

which is identical to the above form. The intercept form also works conveniently in higher dimensions for specifying (hyper)planes, when their intersections with all coordinate axes exist and are known.
Two-point form
Two points (x1,y1)displaystyle (x_1,y_1)
y−yj=y2−y1x2−x1(x−xj),displaystyle y-y_j=frac y_2-y_1x_2-x_1(x-x_j),quadfor j=1,2.displaystyle j=1,2.

In the rest of this paragraph j=1displaystyle j=1
Expanded form
Expanding, regrouping, and appropriately factoring the products leads to
- (y1−y2)x+(x2−x1)y+(x1y2−x2y1)=0,displaystyle (y_1-y_2)x+(x_2-x_1)y+(x_1y_2-x_2y_1)=0,

identifying: a=(y1−y2),b=(x2−x1),displaystyle quad a=(y_1-y_2),quad b=(x_2-x_1),quad 

Symmetric form
Multiplying both sides of the 2-point form by (x2−x1)displaystyle (x_2-x_1)
- (x2−x1)(y−y1)=(y2−y1)(x−x1).displaystyle (x_2-x_1)(y-y_1)=(y_2-y_1)(x-x_1).

This form also works in the case of a non-existing slope (x1=x2displaystyle x_1=x_2


Determinant form
The products in the above equation result also from the evaluation of a 2-rowed determinant, inducing this form of the linear equation:
- |x−x1y−y1x2−x1y2−y1|=0.displaystyle beginvmatrixx-x_1&y-y_1\x_2-x_1&y_2-y_1endvmatrix=0.

Mnemonic determinant
The products on the left hand side of the expanded version can be reproduced by evaluating the 3-rowed determinant, designed for easy memorability:
- |xy1x1y11x2y21|=0.displaystyle beginvmatrixx&y&1\x_1&y_1&1\x_2&y_2&1endvmatrix=0.

Vectorial treatment
Any pair of numbers (x,y)displaystyle (x,y)


- A=||a1a2b1b2||..

Two given points P1=(x1,y1),P2=(x2,y2)displaystyle P_1=(x_1,y_1),;P_2=(x_2,y_2)




The vector from point P1displaystyle P_1
- P12=P2−P1=(x2,y2)−(x1,y1)=(x2−x1,y2−y1)displaystyle P_12=P_2-P_1=(x_2,y_2)-(x_1,y_1)=(x_2-x_1,y_2-y_1)

and similarly the vector from point P1displaystyle P_1
- P1.=P−P1=(x,y)−(x1,y1)=(x−x1,y−y1).displaystyle P_1.=P-P_1=(x,y)-(x_1,y_1)=(x-x_1,y-y_1).

Equating the exterior product of these two vectors, as specified above, to zero, yields a linear equation
- |x−x1y−y1x2−x1y2−y1|=0,displaystyle beginvmatrixx-x_1&y-y_1\x_2-x_1&y_2-y_1endvmatrix=0,

which is identical to the determinant form above.
Matrix form
Writing a linear equation in two unknowns in the form
- Ax+By=C,displaystyle Ax+By=C,

and considering the collection of coefficients (A,B)displaystyle (A,B)





- (AB)(xy)=(C).displaystyle beginpmatrixA&Bendpmatrixbeginpmatrixx\yendpmatrix=beginpmatrixCendpmatrix.

This notation can easily expanded to more linear equations in more than two variables. For example, a system of two equations in two variables
- A1x+B1y=C1,displaystyle A_1x+B_1y=C_1,,
- A2x+B2y=C2,displaystyle A_2x+B_2y=C_2,,


can be denoted with a (2,2)displaystyle (2,2)
- (A1B1A2B2)(xy)=(C1C2).displaystyle beginpmatrixA_1&B_1\A_2&B_2endpmatrixbeginpmatrixx\yendpmatrix=beginpmatrixC_1\C_2endpmatrix.

A system of three linear equations in four variables would employ a (3,4)displaystyle (3,4)


Parametric form
The parametric form of a curve is useful to e.g. describe the movement of a point along this curve, and controlling this movement with a single parameter. This setting resembles the task in physics, where a particle starts at time t=0displaystyle t=0



This task can be solved by adding a motion from h→pdisplaystyle hto p


- x=(k−h)t+hdisplaystyle x=(k-h)t+h

and similarly, the motion in xdisplaystyle x
- y=(q−k)t+k.displaystyle y=(q-k)t+k.

These two linear equations, with variables (t,x)displaystyle (t,x)

For t=0:(x,y)|t=0=(h,k)displaystyle t=0:quad (x,y)


![[0,1]](https://wikimedia.org/api/rest_v1/media/math/render/svg/738f7d23bb2d9642bab520020873cccbef49768d)

Connection with linear functions
A linear equation, written in the form y = f(x) whose graph crosses the origin (x,y) = (0,0), that is, whose y-intercept is 0, has the following properties:
Additivity: f(x1+x2)=f(x1)+f(x2) displaystyle f(x_1+x_2)=f(x_1)+f(x_2)
Homogeneity of degree 1: f(ax)=af(x),displaystyle f(ax)=af(x),,


where a is any scalar. A function which satisfies these properties is called a linear function (or linear operator, or more generally a linear map). However, linear equations that have non-zero y-intercepts, when written in this manner, produce functions which will have neither property above and hence are not linear functions in this sense. They are known as affine functions.
Example
An everyday example of the use of different forms of linear equations is computation of tax with tax brackets. This is commonly done with a progressive tax computation, using either point–slope form or slope–intercept form.
More than two variables
For the general case of a linear equation with n>2displaystyle n>2
- a1x1+a2x2+⋯+anxn+b=0.displaystyle a_1x_1+a_2x_2+cdots +a_nx_n+b=0.

Sometimes bdisplaystyle b


When dealing with n=3displaystyle n=3


The set of solutions of such an equation is a set of ndisplaystyle n
For an equation to have meaningful solutions, at least one coefficient must be non-zero. This can be formulated as
- a12+a22+⋯+an2=∑i=1nai2>0.displaystyle a_1^2+a_2^2+cdots +a_n^2=textstyle sum _i=1^na_i^2>0.

If all coefficients aidisplaystyle a_i

ndisplaystyle n
The set of solutions (ndisplaystyle n
A given equation may be solved for all variables with a non-zero coefficient. Let jdisplaystyle j

- xj=−(baj+a1ajx1+⋯+0⋅xj+⋯+anajxn).displaystyle x_j=-(tfrac ba_j+tfrac a_1a_jx_1+cdots +0cdot x_j+cdots +tfrac a_na_jx_n).

This way the linear equation can be seen as defining a function of (n−1)displaystyle (n-1)
- xj:Rn−1→Rdisplaystyle x_j:;mathbb R ^n-1to mathbb R

See also
- Line (geometry)
- Linear function
- Linear equation over a ring
- Algebraic equation
- Linear belief function
- Linear inequality
Notes
^ Barnett, Ziegler & Byleen 2008, pg. 15
^ The (n-1)-tuples are ordered to represent the removal of j from the sequence 1..n.
References
Barnett, R.A.; Ziegler, M.R.; Byleen, K.E. (2008), College Mathematics for Business, Economics, Life Sciences and the Social Sciences (11th ed.), Upper Saddle River, N.J.: Pearson, ISBN 0-13-157225-3.mw-parser-output cite.citationfont-style:inherit.mw-parser-output qquotes:"""""""'""'".mw-parser-output code.cs1-codecolor:inherit;background:inherit;border:inherit;padding:inherit.mw-parser-output .cs1-lock-free abackground:url("//upload.wikimedia.org/wikipedia/commons/thumb/6/65/Lock-green.svg/9px-Lock-green.svg.png")no-repeat;background-position:right .1em center.mw-parser-output .cs1-lock-limited a,.mw-parser-output .cs1-lock-registration abackground:url("//upload.wikimedia.org/wikipedia/commons/thumb/d/d6/Lock-gray-alt-2.svg/9px-Lock-gray-alt-2.svg.png")no-repeat;background-position:right .1em center.mw-parser-output .cs1-lock-subscription abackground:url("//upload.wikimedia.org/wikipedia/commons/thumb/a/aa/Lock-red-alt-2.svg/9px-Lock-red-alt-2.svg.png")no-repeat;background-position:right .1em center.mw-parser-output .cs1-subscription,.mw-parser-output .cs1-registrationcolor:#555.mw-parser-output .cs1-subscription span,.mw-parser-output .cs1-registration spanborder-bottom:1px dotted;cursor:help.mw-parser-output .cs1-hidden-errordisplay:none;font-size:100%.mw-parser-output .cs1-visible-errorfont-size:100%.mw-parser-output .cs1-subscription,.mw-parser-output .cs1-registration,.mw-parser-output .cs1-formatfont-size:95%.mw-parser-output .cs1-kern-left,.mw-parser-output .cs1-kern-wl-leftpadding-left:0.2em.mw-parser-output .cs1-kern-right,.mw-parser-output .cs1-kern-wl-rightpadding-right:0.2em
External links
Linear Equations and Inequalities Open Elementary Algebra textbook chapter on linear equations and inequalities.
Hazewinkel, Michiel, ed. (2001) [1994], "Linear equation", Encyclopedia of Mathematics, Springer Science+Business Media B.V. / Kluwer Academic Publishers, ISBN 978-1-55608-010-4